[Automatic translation by Google]
Please provide your feedback about the website at feedback@apc.iisc.ernet.in
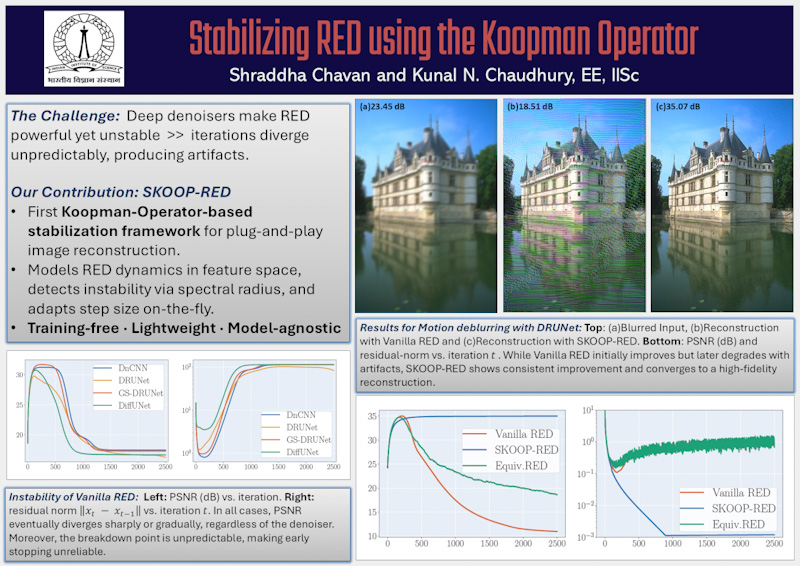
Regularization-by-Denoising (RED) leverages pretrained denoisers as implicit priors for solving inverse imaging problems such as deblurring and super resolution. While RED achieves high-quality reconstructions, it often becomes unstable when powerful deep denoisers are used, as these black-box models typically violate the mathematical conditions required for convergence, resulting in artifacts. This work introduces SKOOP-RED, a data-driven stabilisation framework based on the Koopman operator, a classical construct from dynamical systems theory. SKOOP-RED models the local behaviour of RED iterates in a low-dimensional feature space and exploits the spectral properties of the learned Koopman operator to detect instability and adaptively adjust the step size. The framework is model-agnostic, requires no retraining, and adds less than 20% computational overhead. Experiments with multiple pretrained denoisers show that SKOOP-RED effectively stabilises RED, prevents late-iteration collapse, and produces high-quality reconstructions across architectures and noise levels, providing a principled, training-free route to stable and reliable plug-and-play image reconstruction.
Publications
1. S. Chavan and K. N. Chaudhury, “Stabilizing RED Using the Koopman Operator,” IEEE Signal Processing Letters, vol. 32, pp. 3565-3569, 2025. (doi: 10.1109/LSP.2025.3604690).
Faculty: Kunal Narayan Chaudhury