[Automatic translation by Google]
Please provide your feedback about the website at feedback@apc.iisc.ernet.in
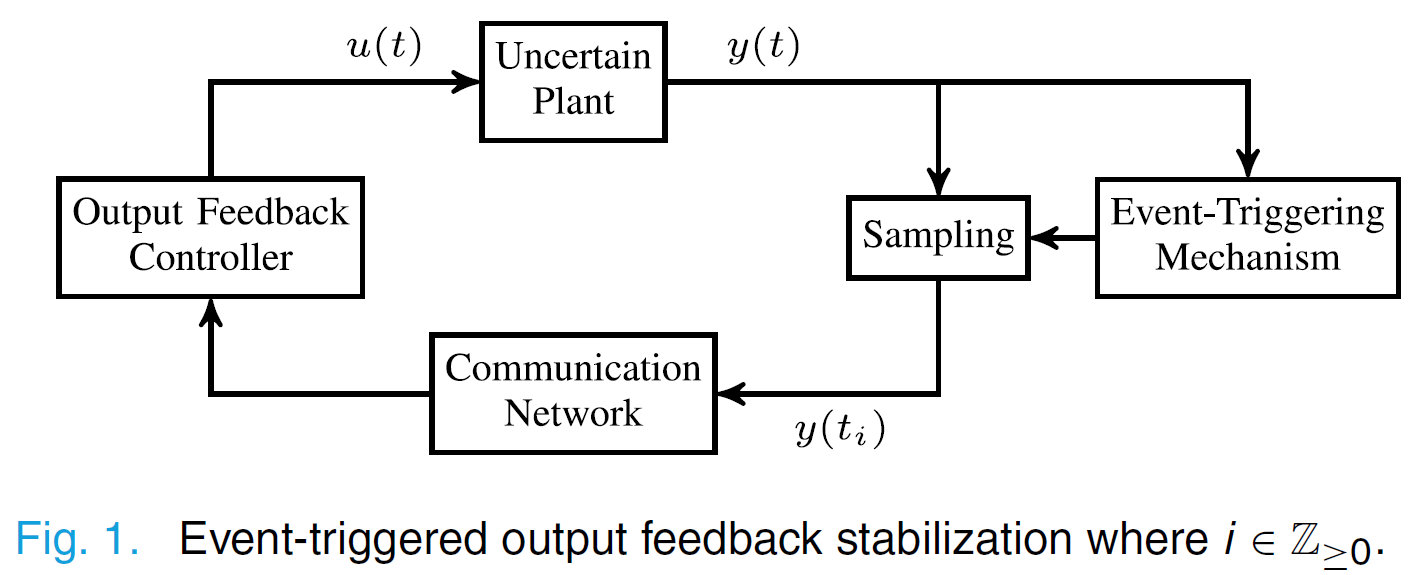
A summary of the work: In this work, an event-triggered output feedback sliding mode controller is designed to investigate the behavior of the perturbed linear time-invariant system. The controller is designed based on the estimated states obtained by employing the event-triggered sliding mode estimation technique. Since the event-triggering mechanism decides the instant of (system) output transmission, we show that under the application of the proposed control strategy, the sliding trajectory converges to any desired bound in a finite time. Moreover, it is shown that the proposed controller guarantees the boundedness of the system trajectory within some predefined bound at transients also, which is essential for different practical applications such as robotics, power systems, etc. We also attempt to reduce the magnitude of the control input by establishing the separation principle along with a switching technique for designing the discontinuous controller gain without affecting the convergence of the sliding variable to its ultimate bound. This reduction in the discontinuous controller gain decreases the control effort, leading to an increase in the inter-event time. Moreover, it also helps reduce the amplitude of chattering.