[Automatic translation by Google]
Please provide your feedback about the website at feedback@apc.iisc.ernet.in
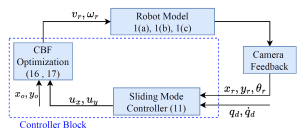
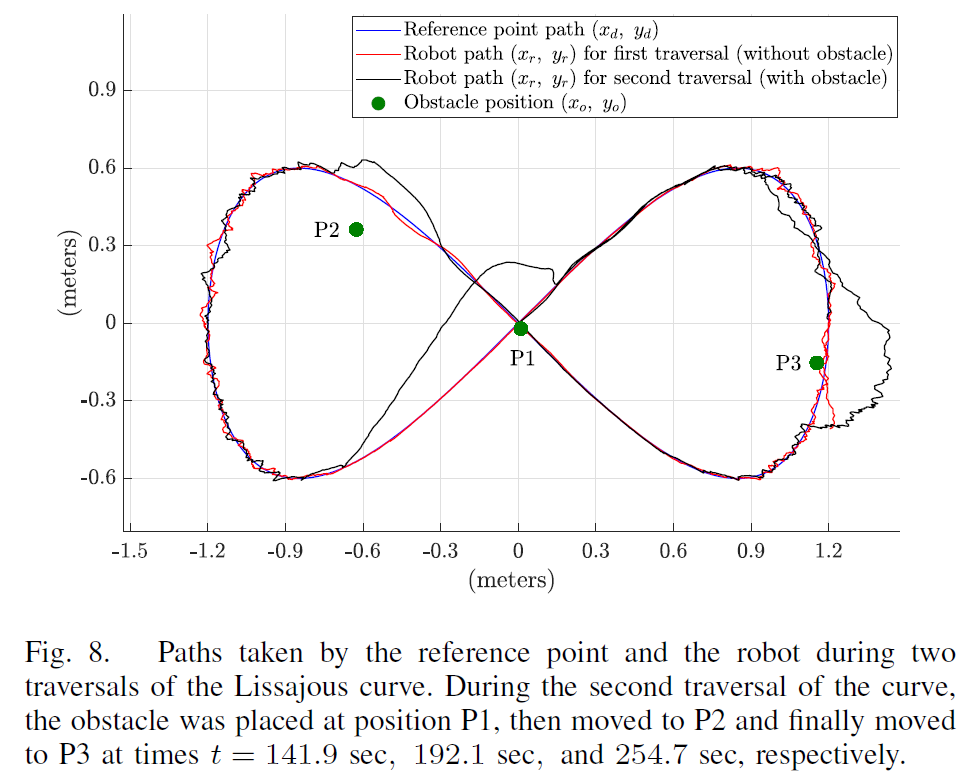
A summary of the work: This work presents a sliding mode control-based strategy for tracking a desired trajectory in the presence of static obstacles for a ground robot. The conventional sliding mode control is employed with a saturation function to reduce the chattering issues. Additionally, an approach based on control barrier functions is implemented for obstacle avoidance, utilizing a second-order barrier function. For collision avoidance, the robot is modeled as a double integrator to optimize control inputs, which are then mapped to a unicycle kinematic model using an approximation. The results of numerical simulations validate the performance of the proposed approach in the presence of disturbance for a desired trajectory. Experimental validation is provided to establish the efficacy of the proposed strategy using a four-wheeled differential drive robot and a camera-based localization system, both of which are developed in-house.
Related publications/patents: Trajectory Tracking Using Sliding Mode Control with Obstacle Avoidance for a Ground Robot, by I. Andrabi, K. Kumari, N. Narayanan, and A. Borkar, In the Proceedings of Australian & New Zealand Control Conference (ANZCC), Gold Coast City, Australia, pp. 105-110, 30th-31st January 2025.
Faculty: Kiran Kumari