[Automatic translation by Google]
Please provide your feedback about the website at feedback@apc.iisc.ernet.in
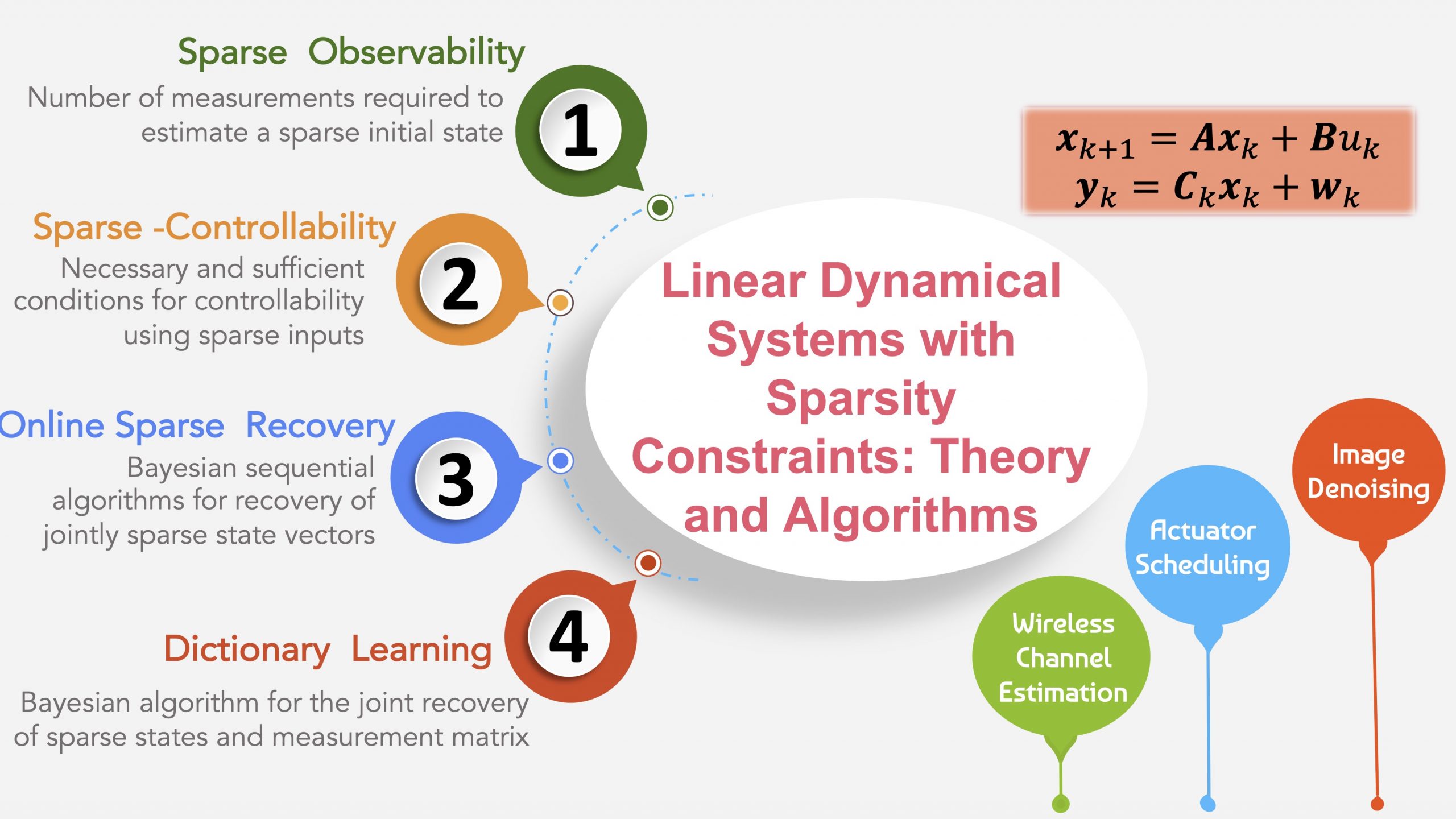
Consider a linear dynamical system with sparsity constraints on the system state and/or the inputs applied. Such constraints arise naturally in bandwidth-constrained networked control systems, where it is desirable to apply sparse inputs, or when the system evolves in time within a low dimensional subspace of the state-space. We ask, and answer, the following fundamental questions:
The main message is that, for observability of the linear dynamical system, the number of measurements required scales linearly with the sparsity level of the state vector rather than its ambient dimension. For controllability, if the system is reversible, there is no penalty due to sparsity: the system is sparse controllable if and only if it is controllable without the sparsity constraints. Many more interesting and novel insights are available in Prof. Chandra R. Murthy’s student Dr. Geethu Joseph’s thesis. Her thesis won the Kaikini Best PhD Thesis Award, ECE department, IISc, and the SPCOM Best PhD Dissertation Award, both in 2020, and the 2022 IEEE Signal Processing Society Best PhD Dissertation Award.
References:
G. Joseph and C. R. Murthy, “Controllability of Linear Dynamical Systems Under Input Sparsity Constraints”, IEEE Transactions on Automatic Control, vol. 66, no. 2, pp. 924-931, Feb. 2021.
G. Joseph and C. R. Murthy, “On the Convergence of a Bayesian Algorithm for Joint Dictionary Learning and Sparse Recovery”, IEEE Transactions on Signal Processing, vol. 68, no. 1, pp. 343-358, 2020.
G. Joseph and C. R. Murthy, “Measurement Bounds for Observability of Linear Dynamical Systems under Sparsity Constraints”, IEEE Transactions on Signal Processing, vol. 67, no. 8, pp. 1992-2006, Apr. 15, 2019.
https://ece.iisc.ac.in/~cmurthy/Linear-Dynamical-Geethu.mp4.
https://ece.iisc.ac.in/~cmurthy/lib/exe/fetch.php?media=geethu_thesis.pdf.
Faculty: Chandra R. Murthy, ECE