[Automatic translation by Google]
Please provide your feedback about the website at feedback@apc.iisc.ernet.in
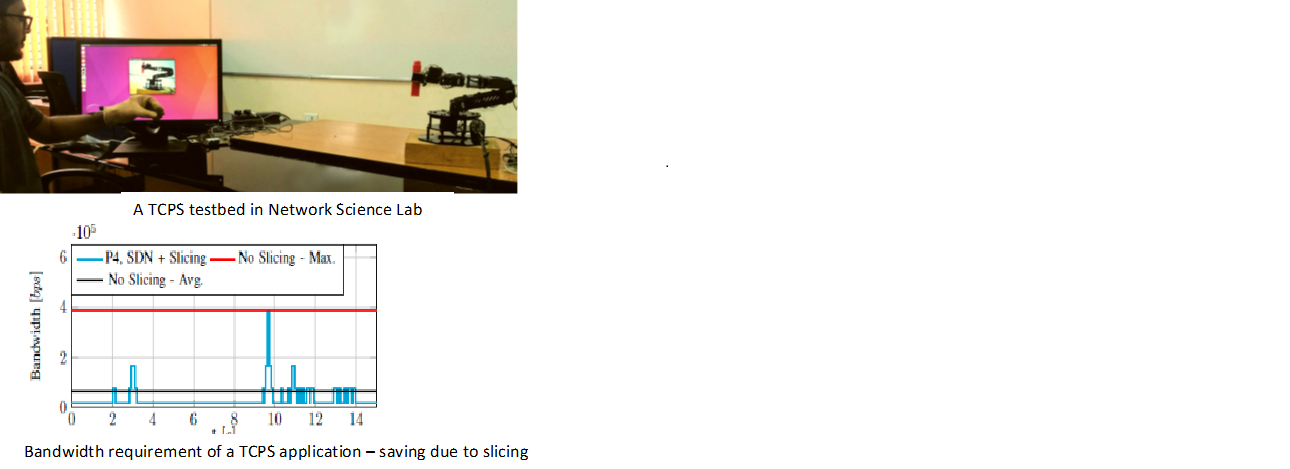
Imagine a person remotely controlling a robot at the wheel of a car or a surgeon remotely controlling a robotic arm to perform a surgery. These are instances of remote delivery and application of “skill-set” through real-time communication of control and haptic, audio and visual feedback. These so called tactile cyber physical systems (TCPSs) comprise human operators with gloves and audio and video playback devices, high-end robots and an ultra-reliable and low-latency communication network. Our work focuses on networking issues, in realizing TCPSs.
We appeal to network slicing for dynamic network resource provisioning for TCPS. We propose a mechanism to dynamically create, destroy and switch network slices per TCPS flow based on instantaneous resource requirements. We develop a clustering algorithm to determine the slices and their specifications and then leverage Software-Defined Networking (SDN) and P4-programmable switches to enable on the-fly provisioning and switching of these slices.
In another work, we use IEEE 802.1 Time Sensitive Networks (TSN) to isolate time critical TCPS flows from external traffic. In particular, we devise a decentralized dynamic scheduling protocol for IEEE 802.1Qbv Time-Aware Shaper (TAS) to guarantee bounded end-to-end packet latencies. We also develop PYTSN, an open-source discrete-event network simulator to evaluate our proposed scheduling protocol.
References:
Kurian Polachan, Chandramani Singh and Prabhakar T V, “Decentralized Dynamic Gate Scheduling of IEEE 802.1Qbv Time Aware Shaper and a TSN Simulatorfor Tactile Cyber-Physical Systems”, IFIP/IEEE International Conference on Integrated Network Management, May 2021, Bordeaux, France
Kurian Polachan, Belma Turkovic, Chandramani Singh, Prabhakar T V and Fernando Kuipers, “Dynamic Network Slicing for the Tactile Internet”, 12th IEEE/ACM International Conference on Cyber-Physical Systems, April 2020, Sydney, Australia
Faculty: Chandramani Singh, ESE and T.V. Prabhakar, ESE