[Automatic translation by Google]
Please provide your feedback about the website at feedback@apc.iisc.ernet.in
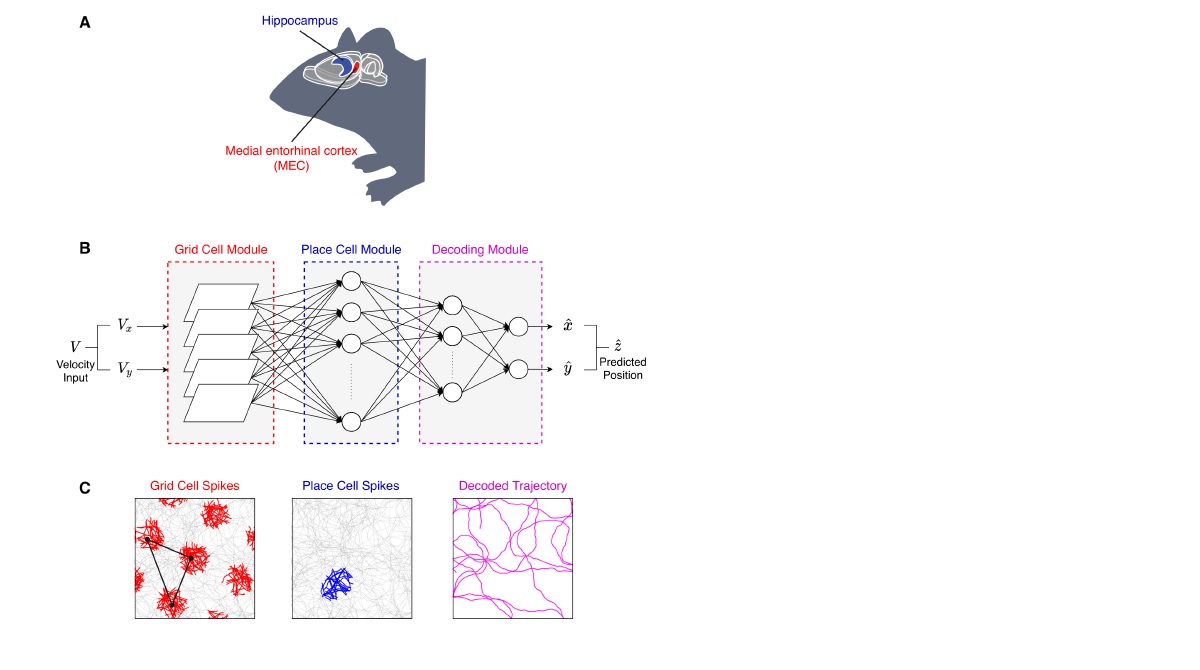
Efficient spatial navigation is extremely essential for the survival of most animals and insects as these organisms actively navigate through the environment in search of food, mating partners or favourable surroundings. The spatial navigation system of the brain comprises multiple brain regions including the hippocampus, the entorhinal and retrosplenial cortices. These brain regions are equipped with numerous spatially selective cell types such as grid cells, place cells, head-directions cells, boundary-vector or border cells and many more. In this study, we report the algorithmic and hardware implementation of biomimetic neural structures encompassing a feed-forward
trimodular, multi-layer architecture representing grid-cell, place-cell and decoding modules for navigation. The grid-cell module consisted of neurons that fired in a grid-like pattern, and was built of distinct layers that constituted the dorsoventral span of the medial entorhinal cortex. Each layer was built as an independent continuous attractor network with distinct grid-field spatial scales. The place-cell module consisted of neurons that fired at one or few spatial locations, organized into different clusters based on convergent modular inputs from different grid-cell layers, replicating the gradient in place-field size along the hippocampal dorsoventral axis. The decoding module, a two-layer neural network that constitutes the convergence of the divergent representations in preceding modules, received inputs from the place-cell module and provided specific coordinates of the navigating object. The tri-modular structure was implemented on Zynq Ultrascale+ field-programmable gate array, and demonstrated its capacity in precisely estimating the navigational trajectory with minimal overall resource consumption involving a mere 2.92% Look Up Table utilization. The proposed bio-inspired spatial navigation model encompassing grid and place cells could be deployed on robotic platforms for navigation and path integration tasks.
Faculty: Rishikesh Narayanan, Cellular Neurophysiology Laboratory, Molecular Biophysics Unit, Indian Institute of Science, Bangalore 560012, India.
(http://mbu.iisc.ernet.in/~rngrp/people.html)
Chetan Singh Thakur, NeuRonICS Lab, Department of Electronic Systems Engineering, Indian Institute of Science, Bangalore 560012, India
(https://labs.dese.iisc.ac.in/neuronics/people/)
Publication: Adithya Krishna, Divyansh Mittal, Siri Garudanagiri Virupaksha, Abhishek Ramdas Nair, Rishikesh Narayanan, Chetan Singh Thakur, Biomimetic FPGA-based spatial navigation model with grid cells and place cells, Neural Networks, Volume 139, 2021, Pages 45-63, ISSN
0893-6080, https://doi.org/10.1016/j.neunet.2021.01.028.
(https://www.sciencedirect.com/science/article/pii/S0893608021000368)